一、设备组成及指标:
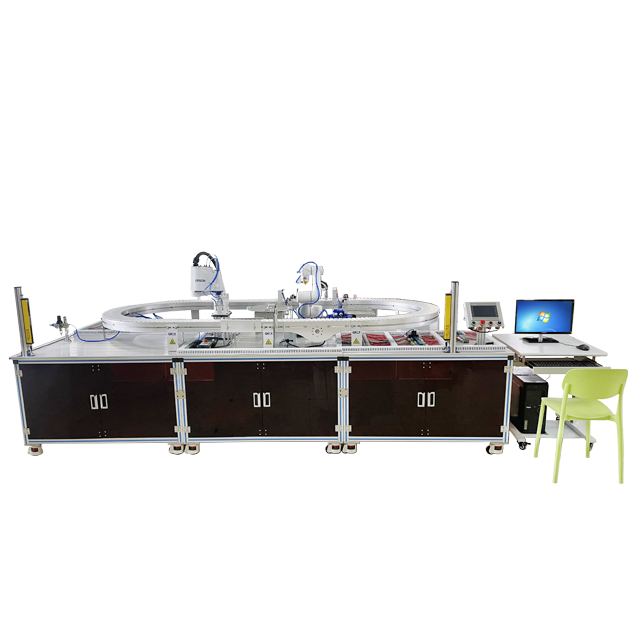
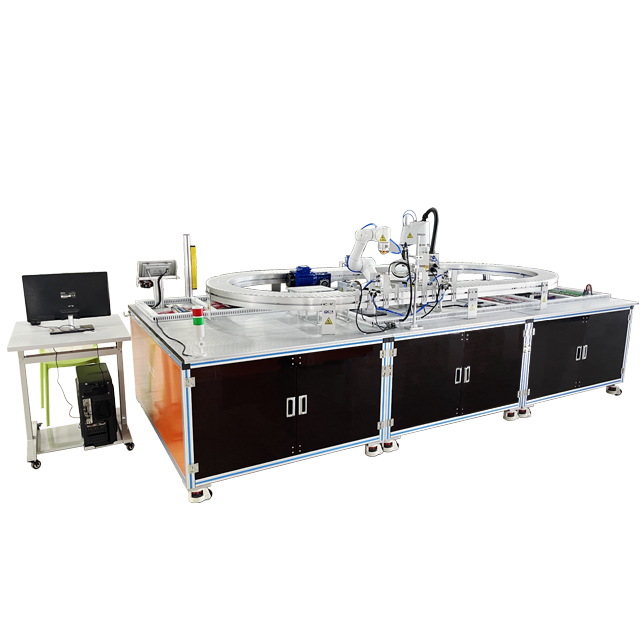
1.实训系统由实训台、原材料库Ⅰ、原材料库Ⅱ、协作工业机器人单元、四轴工业机器人单元、环形装配检测机构、转盘机构、协作机器人装配分拣单元、视觉检测装置、对射光幕装置、成品库、切割工艺模拟装置、控制系统、装配桌、电脑桌及设备资源包组成。
2.外型尺寸:3600*1600*800mm;40 型铝型材结构,侧面优质钣金封板,厚度1.2mm,门采用亚克力结构。底部采用 80f 福马轮,轮子可 360°旋转,自带扭式刹车。
3.协作机器:
工作半径:625mm,负载:3kg,重量:16kg,重复定位精度±0.02mm,平均功耗 150W,防护等级 IP54, 各个自由度运动范围及最达速度,轴 1±175°·178°/s,轴 2±175°·178°/s,轴 3±175°·178°/s,轴 4±175°·237°/s,轴 5±175°·237°/s,轴 6±175·237°/s°,数字输入 4 点,数字输出 4 点,输出电压 24V;控制柜外形尺寸 457mm*314mm*238mm,重量 15kg,防护等级 IP43,供电电源 220VAC,支持 Ethernet/Modus-RTU/TCP 通讯,数字量输入 8 路\输出 8 路;示教器外观尺寸 254*213*40mm,重量 0.75kg,防护等级 IP43,带有急停按钮。
4.四轴工业机器人
安装方式:台面安装
臂长:第 1-2 轴臂:400 mm
最大运动速度:
第 1-2 关节:7200 mm/s
第 3 关节:1100 mm/s
第 4 关节:2600 °/s
本体重量(不含线缆重):14 kg
重复定位精度:
第 1-2 关节:±0.01 mm
第 3 关节:±0.01 mm
第 4 关节:±0.01°
最大运动范围:
第 1 关节:±132°
第 2 关节:±141°
第 3 关节(洁净型):150 mm (120 mm)
第 4 关节:±360°
负载*1:
额定值:1 kg
最大值:3 kg
标准循环时间*2:0.42 秒
第 4 关节容许惯性力矩*3:
额定值:0.005 kg·m2
最大值:0.05 kg·m2 电机功耗:
第 1 关节:200 W 第 2 关节:100 W 第 3 关节;100 W 第 4 关节:100 W
第 3 关节顶压力:100 N 原点复位:无需原点复位
用户电路:15 针(D-SUB 接口),RJ45 8 针(CAT 5e) 用户气路:∅4mm×1, ∅6mm×2
耐压:0.59 MPa (6 kgf/cm2) (86 psi) 安装环境-标准型/洁净型*4
适用控制器:RC90-B 安全标准:CE,KC
5.供料单元模块组成
原材料库Ⅰ:采用分区布局方式,方便原料放置。
原材料库Ⅱ:采用专用定位装置,能够与原材料库Ⅰ配合使用。
6.环形装配检测机构组成:
环形装配单元提供两种物料的转盘、安装支架、气动抓手、伺服电机、检测装置组成。安装于两个机器人之间,接收来自四轴工业机器人的物件,为装配提供安装平台,具有检测用电源接口,同时为视觉检测提供平台。
7.成品库
采用分区布局方式,分为成品区,和废品区,在成品区里面根据颜色和质量进行分类。
8.视觉检测模块
能够分辨按钮是否安装成功,以及按钮的颜色,并能提供与PLC 链接接口。采用国产品牌。
9.PLC 系统:1200PLC 及以上系列;14 输入 10 输出;额定电压:4MA 时 24VDC,额定值允许的连续电压:最大 30VDC;浪涌电压35VDC,持续 0.5s 模拟量输入输入路数:2;类型:电压(单侧) 范围:0-10V 输出;输出点数:10;类型:固态-MOSFET;电压范围:20.4-28.8V DC。
10.可视化人机界面采用国产品牌,具有强大的通信功能。